













linmctool is a command-line utility which handles Bluetooth communications with several models of motion-sensing game controllers, and outputs sensor data in plain text. It is intended as a simple and portable tool for educational and research purposes in relation to such topics as 3D coordinate systems, Newtonian physics, robotics, sensor fusion, motion tracking and new user interfaces. Motion-sensing game controllers are a great opportunity to introduce children and students to a wide range of scientific topics, from the basic concept of inertial forces all the way to Kalman filtering.
The following devices are supported:
Wiimote (including infrared sensor and gyros)
SIXAXIS
DS3
PS Move (excluding PS Eye camera)
Sample output follows:
0 00:25:xx:xx:xx:xx WIIMOTE aX=-11 aY=-10 aZ=14 ir0x=966 ir0y=406 ir1x=747 ir1y=419 \ ir2x=554 ir2y=430 ir3x=467 ir3y=389 gX=209 gY=-298 gZ=232 1 00:19:xx:xx:xx:xx SIXAXIS aX=-3 aY=-21 aZ=-111 gZ=-21 2 00:06:xx:xx:xx:xx PSMOVE seq=0 aX=-2613 aY=-329 aZ=3271 gX=5 gY=8 gZ=8 mX=-197 mY=-157 mZ=-58
These game controllers are marketed as peripherals with Bluetooth connectivity (Bluetooth is an open standard which promotes interoperability between computers and wireless devices) and linmctool communicates with their open interfaces via the standard Bluetooth HID protocol. There is no need to modify the devices or circumvent any protection. Still, since this software is not endorsed by manufacturers, we cannot guarantee that it configures the hardware exactly as intended. There is always a risk of voiding the warranty, damaging the hardware by operating it beyond safe ratings, or worse. Use at your own risk !
For example, it is unknown whether the PS Move autonomously regulates the power of its RGB LEDs or whether the Bluetooth host is supposed to do it based on temperature readings. As a precaution, linmctool will limit brightness to 25 %.
linmctool is not a full-featured driver for HID peripherals. It does not support buttons. It does not provide an efficient binary API for applications.
Since there is no documentation for these devices, it is likely that linmctool does not take advantage of their full functionality or accuracy.
In order to avoid the limitations of the hidraw interface on some kernels, linmctool bypasses the Linux Bluetooth HID layer entirely. It must run with root privileges to take control of HID L2CAP PSMs 17 and 19. Other Bluetooth HID devices such as keyboards and mice cannot be used simultaneously. When used without root privileges, only the Wiimote is supported.
linmctool does not use Bluetooth authentication nor encryption.
linmctool supports any number of simultaneous devices, but system and hardware resource limitations apply. With some configurations, it may be difficult to reach the Bluetooth limit of 7 devices per adapter. Besides, with multiple devices transmitting simultaneously, packet loss may occur.
linmctool may fail to reliably distinguish a SIXAXIS from a DS3. If your DS3 rumbles continuously, use linmctool --force-ds3; if your SIXAXIS gyro does not work, use linmctool --force-sixaxis; and please send the output of linmctool --dump-readable to the author.
Unlike other approaches which tend to face compatibility and integration issues, linmctool is designed to compile and run easily on any Linux distribution, with barely any dependency.
# wget http://www.pabr.org/linmctool/linmctool-20110304.c # gcc --std=gnu99 -Wall linmctool-20110304.c -lusb -o linmctool
For systems without libusb, compile with -DWITHOUT_USB. USB pairing, if needed, will have to be performed on another host (see Pairing ).
# gcc --std=gnu99 -Wall -DWITHOUT_USB linmctool-20110304.c -o linmctool





The Wiimote is capable of powering up and initiating a Bluetooth connection when any button is pressed, but this feature cannot be supported with all models of Bluetooth adapters. Therefore linmctool requires a more complex procedure.
Obtain the Bluetooth address of the Wiimote . Put it in discoverable mode by simultaneously pressing buttons 1 and 2, then run hcitool scan while the blue LEDs are flashing. Write down the Bluetooth address formatted as xx:xx:xx:xx:xx:xx.
Establish the Bluetooth connection . Pass the Bluetooth address(es) to linmctool as command-line arguments. Within seconds before starting linmctool, put the Wiimote(s) in discoverable mode again by simultaneously pressing buttons 1 and 2.
# ./linmctool --ir --wmp 00:25:xx:xx:xx:xx Waiting for Bluetooth connections. Connecting to 00:25:xx:xx:xx:xx New device 0 00:25:xx:xx:xx:xx is a Wiimote 0 00:25:xx:xx:xx:xx WIIMOTE aX=-11 aY=-10 aZ=14 ir0x=966 ir0y=406 ir1x=747 ir1y=419 \ ir2x=554 ir2y=430 ir3x=467 ir3y=389 gX=209 gY=-298 gZ=232


Disabling the Bluetooth HID layer on old Linux distributions with hidd . Simply terminate hidd:
# killall hiddDisabling the Bluetooth HID layer on recent Linux distributions with bluetoothd . Add input to the directive DisablePlugins in
/etc/bluetooth/main.conf:[General] # List of plugins that should not be loaded on bluetoothd startup DisablePlugins = network,input
Then restart bluetoothd:
# service bluetooth restartPairing . These devices must be paired with a Bluetooth adapter of the Linux host. They apparently do not support the standard Bluetooth pairing procedure; instead, pairing is performed over USB, which is arguably simpler and more secure. Pairing is persistent: there is no need to repeat this procedure, unless the device has been paired with another host.
Connect the device with a USB cable.
Run linmctool:
# ./linmctool Waiting for Bluetooth connections. USB: PS MOVE Changing master from xx:xx:xx:xx:xx to yy:yy:yy:yy:yy:yy Now press the PS button.Disconnect the USB cable. (The PS Move can be used in Bluetooth mode while plugged in, but this is not recommended, for obvious reasons.)
Devices will be paired with the first active Bluetooth adapter, as reported by `hcitool dev`. In order to pair with another adapter, or with an adapter on another machine, obtain its Bluetooth address by running hcitool dev, and pass it as follows:
# ./linmctool --master xx:xx:xx:xx:xx:xxEstablishing the Bluetooth connection . Press the PS button at any time while linmctool is running and the USB cable is unplugged.
# ./linmctool Waiting for Bluetooth connections. Incoming connection... New device 0 00:06:xx:xx:xx:xx is a PS Move 0 00:06:xx:xx:xx:xx PSMOVE seq=0 aX=4232 aY=-135 aZ=652 gX=4 gY=-9 gZ=-7 \ mX=-94 mY=50 mZ=-91PS Move bulb control . R,G,B components can be specified on the command-line and updated per-device by typing commands on standard input. Changes are sent to the device within 3 seconds.
# ./linmctool --rgb 0,10,0 Waiting for Bluetooth connections. Incoming connection... New device 0 00:06:xx:xx:xx:xx is a PS Move 0 rgb 10,0,0 ...
Here are debugging techniques which can help improve support for these devices.
To see the HID descriptors of a USB device in plain text, simply use lsusb -v. Do this after running linmctool; otherwise lsusb will print "
Report Descriptors: ** UNAVAILABLE **".binhistogram displays bit-wise and byte-wise histograms of input reports.
# wget http://www.pabr.org/linmctool/binhistogram.c # gcc --std=gnu99 -Wall binhistogram.c -o binhistogram # ./linmctool --binary | ./binhistogram
For example, with the PS Move, this tool reveals that slowly depressing the trigger produces evenly spaced analog values, but in alternating fields:
6 41 29 00###### #_________#__________#______#____#____#__#_____________________ 7 43 2b 00###### #__#_____________#_______#_____#___#___#___#___________________
This suggests that two samples are sent per input report. The same effect can be observed with the accelerometers and gyros (but not with the magnetometers). The sampling rate is about 175 Hz.
linmctool --dump-readable dumps all 1024 HID reports of the first detected device (either USB or Bluetooth).
linmctool --dump-readable --repeat-dump 5 detects readable reports with a dynamic content.
linmctool --dump-writable detects writable reports (by trying to write 16 null bytes, which could be dangerous).
With the PS Move connected via USB, these tools reveal that report number 0x04 contains Bluetooth addresses. Report 0x04 is not writable, but its neighbours 0x03 and 0x05 are. Also, the first byte of most (but not all) reports is the report ID.
Use hcidump -t -V -x to diagnose Bluetooth connection failures.
mccalibrate turns raw data from linmctool into physically-relevant metric values.
The current implementation simply performs a linear mapping. Two reference values (±1 g, ±1 rad/s) for each sensor axis are stored in the working directory.
# wget http://www.pabr.org/linmctool/mccalibrate-20110304.c # gcc --std=gnu99 -Wall mccalibrate-20110304.c -lm -o mccalibrate
mccalibrate --static calibrates the static sensors of the PS Move (accelerometers and magnetometers). The device must be manually put in six distinct orientations (for example: normal, upside-down, roll left, roll right, pitch up, pitch down). mccalibrate determines the reference values by fitting an ellipsoid to the data.
# ./linmctool --nostdin | ./mccalibrate --static
Incoming connection...
New device 0 00:06:xx:xx:xx:xx is a PS Move
Read calibration from 00:06:xx:xx:xx:xx.cal
Put PS MOVE in at least 6 orientations.
Press RETURN to sample when it is stationary.
Please wait 1s... Got 1 samples, please continue.
Please wait 1s... Got 2 samples, please continue.
Please wait 1s... Got 3 samples, please continue.
Please wait 1s... Got 4 samples, please continue.
Please wait 1s... Got 5 samples, please continue.
Please wait 1s... Computing...
ACC: 6 samples, coverage 99% 99% 99%, err 19.792511
MAG: 6 samples, coverage 98% 95% 99%, err 0.741071
A0 min +656 ppm max +1339 ppm
A1 min -2325 ppm max +204 ppm
A2 min -496 ppm max -2189 ppm
G0 min +0 ppm max +0 ppm
G1 min +0 ppm max +0 ppm
G2 min +0 ppm max +0 ppm
M0 min -101515 ppm max +78074 ppm
M1 min -72260 ppm max +102799 ppm
M2 min -98625 ppm max +91781 ppm
Wrote 00:06:xx:xx:xx:xx.cal
Known limitations:
The cost function is algebraic (Euclidian distance might be better)
Minimization is performed by a random walk (not guaranteed to converge)
Axes are assumed perfectly orthogonal (no cross-axis sensitivity)
Local gravity is assumed to be 9.81 m/s² (should be adjusted for altitude; will not work on the ISS).
# ./linmctool | ./mccalibrate
Waiting for Bluetooth connections.
Incoming connection...
New device 0 00:06:xx:xx:xx:xx is a PS Move
Read calibration from 00:06:xx:xx:xx:xx.cal
0 00:06:xx:xx:xx:xx PSMOVE seq=12 aX=-0.10400 aY=9.82060 aZ=-0.00367 \
gX=0.00000 gY=0.00500 gZ=0.03833 mX=0.1890 mY=0.9726 mZ=-0.3458
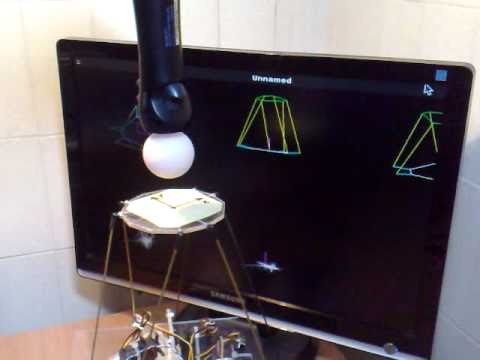
mctrack estimates and graphically displays the position and orientation of up to four devices. The current version works only with the PS Move.
# wget http://www.pabr.org/linmctool/mctrack-20110304.c # gcc --std=gnu99 -Wall mctrack-20110304.c -lX11 -lm -o mctrack # ./linmctool | ./mccalibrate | ./mctrack
There is plenty of published research on motion estimation with accelerometers, gyros and magnetometers. mctrack is intended as a basic example; it implements naive Euler integration of instantaneous rotation and acceleration, with long-term registration to a reference position and an absolute orientation defined by gravity and magnetic field. Damping factors are hard-coded.
The HID-over-L2CAP-socket code is inspired from the hidd daemon in Bluez. This approach, which achieves maximum portability, was explored earlier by Jim Paris.
Wiimote support is based on technical information published by the Wiibrew project.
SIXAXIS/DS3 support is from [SIXLINUX], with additional support for LEDs, gyro and rumble.
The MoveOnPC project pioneered work toward open-source support for the PS Move, primarily on Windows, and with a wider scope including optical tracking with the PS Eye camera.
Thanks to Sony and Nintendo for adopting Bluetooth, an open standard, in their gaming systems. Although they are sometimes criticized for not fully complying with the HID specifications, their protocols remain reasonably open and intelligible. Things would have been much worse if the product designers had opted to actively impede third-party projects such as this one.
[SIXLINUX] Using the PlayStation 3 controller in Bluetooth mode with Linux . http://www.pabr.org/sixlinux/sixlinux.en.html .